Sources of Errors in GPS and their Correction


- Satellite Geometry
- Satellite Orbits
- Multipath Effect
- Atmospheric Effects
- Clock Inaccuracies and Rounding Errors
1. Satellite Errors:
- Slight inaccuracies in time keeping by the satellites can cause errors in calculating positions.
- Satellites drift slightly from their predicted orbits which contributes to errors.
Let the GPS receiver receive signals from 4 satellites, then there are two cases:
CASE 1
The satellites are at 90° to each other w.r.t the GPS receiver. For demonstration purpose we will take 2 satellites. The possible positions are marked by the light green circles. The point of intersection of the two circles is a rather small, more or less quadratic field (dark green), the determined position will be rather accurate.
CASE 2
The satellites are not at 90° to each other w.r.t the GPS receiver, the possible intersection area of the two circles is rather larger hence less accurate.
2. Satellite Orbits
Slight shifts of the orbits are possible due to gravitation forces
- Sun and moon have a weak influence on the orbits
- The resulting error being not more than 2 m
3. Multi-path error:
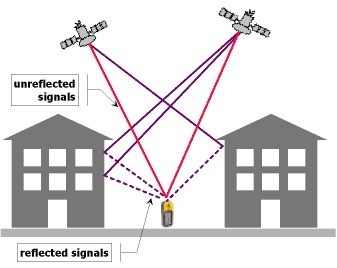 As the GPS signal finally arrives at the earth’s surface, it may be reflected by local obstructions before it gets to the receiver’s antenna. This is called multi-path error as the signal is reaching the antenna in single line path as well as delayed path. The effect is similar to a double image on a tv set.
As the GPS signal finally arrives at the earth’s surface, it may be reflected by local obstructions before it gets to the receiver’s antenna. This is called multi-path error as the signal is reaching the antenna in single line path as well as delayed path. The effect is similar to a double image on a tv set.
The multipath effect is caused by reflection of satellite signals (radio waves) on objects. For GPS signals this effect mainly appears in the neighborhood of large buildings or other elevations. The reflected signal takes more time to reach the receiver than the direct signal. The resulting error typically lies in the range of a few meters.
4. Atmospheric Effects :
The GPS signals have to travel through charged particles and water vapors in the atmosphere which delays its transmission. Since the atmosphere varies at different places and at different times, it is not possible to accurately compensate for the delays that occur.
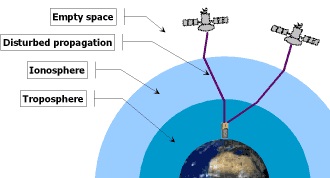 While radio signals travel with the velocity of light in the outer space, their propagation in the ionosphere and troposphere is slower. In the ionosphere (consisting of layers) in a height of 80 – 400 km a large number of electrons and positive charged ions are formed by the ionizing force of the sun. The layers refract the electromagnetic waves from the satellites, resulting in an elongated runtime of the signals. Since the Electromagnetic waves emit in form of a sphere, therefore, Inverse square law is employed and the waves are slowed down inversely proportional to the square of their frequency (1/f2) while passing the ionosphere. The reasons for the refraction in troposphere are different concentrations of water vapors, caused by different weather conditions. The error caused that way is smaller than the ionosphere error, but cannot be eliminated by calculation. It can only be approximated by a general calculation model.
While radio signals travel with the velocity of light in the outer space, their propagation in the ionosphere and troposphere is slower. In the ionosphere (consisting of layers) in a height of 80 – 400 km a large number of electrons and positive charged ions are formed by the ionizing force of the sun. The layers refract the electromagnetic waves from the satellites, resulting in an elongated runtime of the signals. Since the Electromagnetic waves emit in form of a sphere, therefore, Inverse square law is employed and the waves are slowed down inversely proportional to the square of their frequency (1/f2) while passing the ionosphere. The reasons for the refraction in troposphere are different concentrations of water vapors, caused by different weather conditions. The error caused that way is smaller than the ionosphere error, but cannot be eliminated by calculation. It can only be approximated by a general calculation model.
Receiver Error:
Since the receivers are also not perfect, they can introduce their own errors which usually occur from their clocks or internal noise. Despite the synchronization of the receiver clock with the satellite time during the position determination, the remaining inaccuracy of the time still leads to an error of about 2 m in the position determination. Rounding and calculation errors of the receiver sum up approximately to 1 m.
|
Error
|
VALUE (Approx)
|
|
Ionosphere
|
4.0 meters
|
|
Clock
|
2.1 meters
|
|
Orbit
|
2.1 meters
|
|
Troposphere
|
0.7 meters
|
|
Receiver
|
0.5 meters
|
|
Multipath
|
1.0 meter
|
|
TOTAL
|
10.4 meters
|
Selective Availability:
- Selective availability (SA) was the intentional error introduced by DoD to make sure that no hostile forces used the accuracy of GPS against the US or its allies.
- On May 1st, 2000, the White House announced a decision to discontinue the intentional degradation of the GPS signals to the public. Civilian users of GPS will be able to pinpoint locations up to ten times more accurately.
Methods of Correcting GPS Errors
- Real Time Correction
- Post-Processing Correction
- Satellite Differential Services
Real Time Correction
- The base station calculates and broadcasts corrections for each satellite as it receives the data.
- The correction is received by the roving receiver via a radio signal and applied to the position it is calculating.
- As a result, the position displayed on the roving GPS receiver is a differentially corrected position.
Post Processing Correction
- Differentially correcting GPS data by post-processing uses a base GPS receiver that logs positions at a known location and a rover GPS receiver that collects positions in the field.
- The files from the base and rover are transferred to the office processing software, which computes corrected positions for the rover's file.
- This resulting corrected file can be viewed in or exported to a GIS.